YOLO11 姿势识别
该模型的功能是识别姿态,输出的是鼻子、眼睛、耳朵、肩部、手部、腿部等关键点的坐标,可以基于这些坐标来判断姿势。也可以自己训练识别其他动物的姿势等。

准备模型文件
我们提供的程序包里会有一个名为yolo11n-pose.nb的文件,这就是在核桃派2B(T527) NPU上运行YOLO11姿势识别的模型文件。

想尝试自行转换模型可以参考:模型转换教程
安装OpenCV
本教程需要用到OpenCV库,安装方法参考:OpenCV安装
Python运行模型
核桃派2B v1.3.0 版本以上系统提供一套封装好的YOLO11 Python库。
1. 实例化yolo11类
实例化YOLO11_POSE类,需要传入模型文件的路径
from walnutpi import YOLO11
yolo = YOLO11.YOLO11_POSE("model/yolo11n-pose.nb")
2. 运行模型-阻塞式
使用run方法即可运行模型,并返回检测结果,需要传入3个参数
- 图片数据, 使用opencv的读取图片方法进行读取即可
- 置信度阈值, 只会返回置信度高于这个值的检测框
- 检测框重叠度阈值, 模型经常会在物体周围同时命中多个检测框,如果框之间的面积重合度高于这个值,则只保留置信度最高的框,删除其他重合框
# 读取图片
import cv2
img = cv2.imread("image/bus.jpg")
# 检测
boxes = yolo.run(img, 0.5, 0.5)
3. 运行模型-非阻塞式
使用run_async方法会创建一个线程来运行模型,然后立刻返回。需要传入3个参数
- 图片数据, 使用opencv的读取图片方法进行读取即可
- 置信度阈值, 只会返回置信度高于这个值的检测框
- 检测框重叠度阈值, 模型经常会在物体周围同时命中多个检测框,如果框之间的面积重合度高于这个值,则只保留置信度最高的框,删除其他重合框
非阻塞式运行需要配合 is_running 属性使用,他的值是 true或false,表示后台是否跑着run_async启动的模型运行线程。如果后台已经跑着一个运行线程了,则运行run_async时不会再启动新的线程。也可以用此属性来判断模型运行线程跑完了没,是否可以获取结果了。
使用get_result()方法 会返回后台的识别结果,与阻塞式方法run得到的是相同的东西
import cv2
img = cv2.imread("image/bus.jpg")
yolo.run_async(img, 0.5, 0.5)
while yolo.is_running:
time.sleep(0.1)
boxes = yolo.get_result()
4. 检测结果
run方法和get_result方法返回的都是一个列表,如果图片中检测不到东西则返回一个空的列表。列表里每个值都代表一个命中了的检测框,每个检测框对象都包含以下属性
| 属性 | 说明 |
|---|---|
| x | 检测框中心点的x坐标 |
| y | 检测框中心点的y坐标 |
| w | 检测框的宽度 |
| h | 检测框的高度 |
| reliability | 表示检测框的置信度,例如:0.78 |
| label | 检测框的标签,一般pose模型只识别1种类别的物体 |
| keypoints | 每个关键点的信息 |
keypoints属性是一个列表,列表的每个值都是关键点对象,例如使用yolo官方的人体姿势模型,会有17个关键点,顺序是
| 关键点序号 | 关键点名称 |
|---|---|
| 0 | 鼻子 |
| 1 | 左眼 |
| 2 | 右眼 |
| 3 | 左耳 |
| 4 | 右耳 |
| 5 | 左肩 |
| 6 | 右肩 |
| 7 | 左手肘 |
| 8 | 右手肘 |
| 9 | 左手腕 |
| 10 | 右手腕 |
| 11 | 左髋部 |
| 12 | 右髋部 |
| 13 | 左膝盖 |
| 14 | 右膝 |
| 15 | 左脚踝 |
| 16 | 右脚踝 |
每个关键点对象都包含以下属性 | 属性 | 说明 | | ---------- | ----------------------------- | | xy | 关键点的xy坐标,例如(192,320) | | visibility | 该点可见的概率 |
可以使用以下代码输出所有检测到的框的信息
print(f"boxes: {boxes.__len__()}")
for box in boxes:
print(
"{:f} ({:4d},{:4d}) w{:4d} h{:4d} lbael:{:d}".format(
box.reliability,
box.x,
box.y,
box.w,
box.h,
box.label,
)
)
示例程序
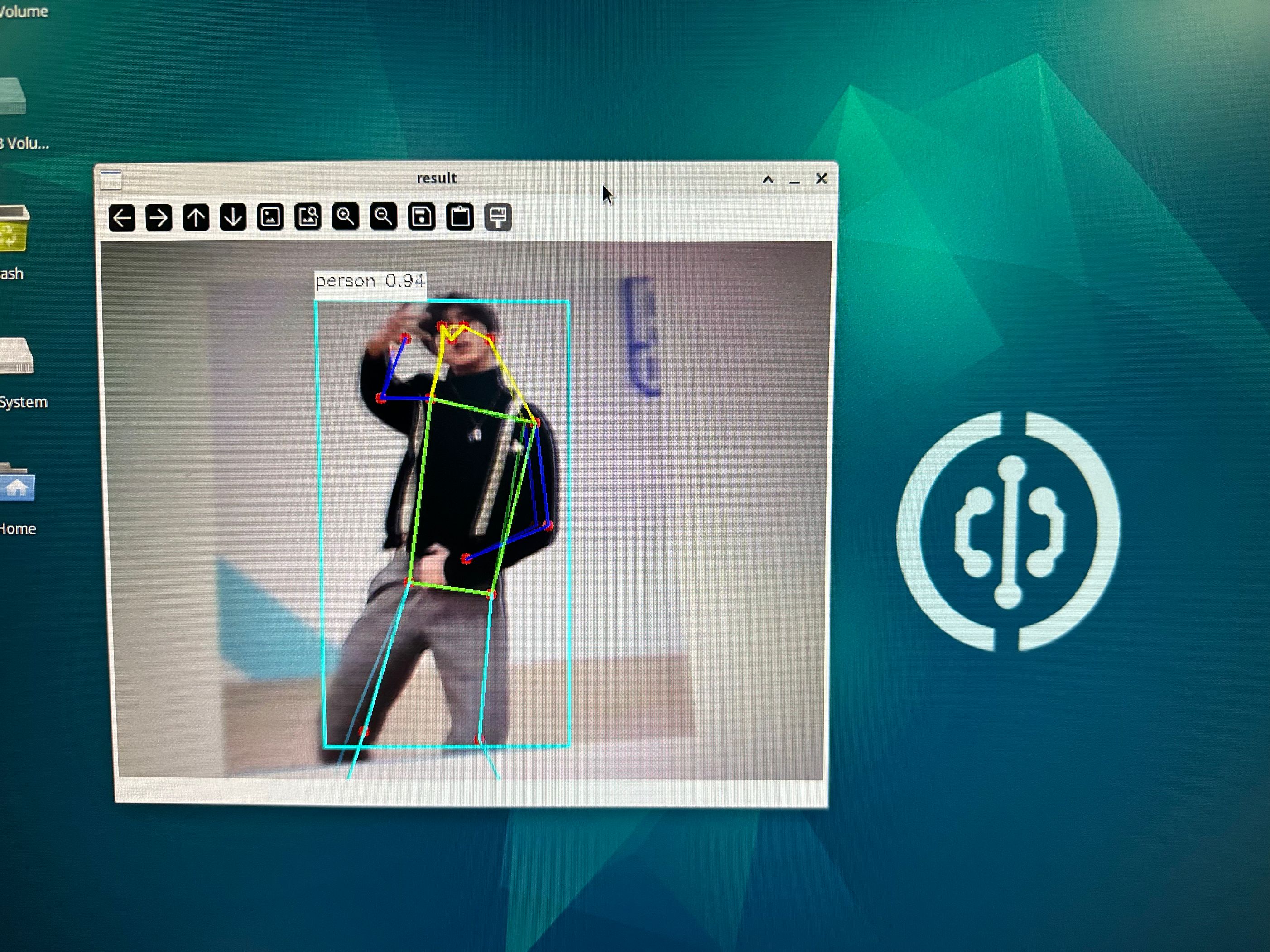
基于图片
读取图片做检测,绘制检测到的的关键点
'''
实验名称:YOLO11姿势识别
实验平台:核桃派2B
说明:基于图片
'''
from walnutpi import YOLO11
import cv2
#【可选代码】允许Thonny远程运行
import os
os.environ["DISPLAY"] = ":0.0"
label_names = ["person"]
model_path = "model/yolo11n-pose.nb"
picture_path = "image/person.jpg"
output_path = ".result.jpg"
# 检测图片
yolo = YOLO11.YOLO11_POSE(model_path)
boxes = yolo.run(picture_path, 0.5, 0.5)
# 到图上画框
img = cv2.imread(picture_path)
for box in boxes:
left_x = int(box.x - box.w / 2)
left_y = int(box.y - box.h / 2)
right_x = int(box.x + box.w / 2)
right_y = int(box.y + box.h / 2)
label = str(label_names[box.label]) + " " + str('%.2f'%(box.reliability))
(label_width, label_height), bottom = cv2.getTextSize(
label,
cv2.FONT_HERSHEY_SIMPLEX,
0.5,
1,
)
cv2.rectangle(
img,
(left_x, left_y),
(right_x, right_y),
(255, 255, 0),
2,
)
cv2.rectangle(
img,
(left_x, left_y - label_height * 2),
(left_x + label_width, left_y),
(255, 255, 255),
-1,
)
cv2.putText(
img,
label,
(left_x, left_y - label_height),
cv2.FONT_HERSHEY_SIMPLEX,
0.5,
(0, 0, 0),
1,
)
# 0 鼻子 1 左眼 2 右眼 3 左耳 4 右耳 5 左肩 6 右肩
# 7 左手肘 8 右手肘 9 左手腕 10 右手腕 11 左髋部 12 右髋部
# 13 左膝盖 14 右膝盖 15 左脚踝 16 右脚踝
for i in box.keypoints: # 绘制所有可见度够高的关键点
if i.visibility > 0.5:
cv2.circle(img, i.xy, 5, (0, 0, 200), -1)
# 头部连接
cv2.line(img, box.keypoints[3].xy, box.keypoints[1].xy, (0, 255, 255), 2)
cv2.line(img, box.keypoints[1].xy, box.keypoints[0].xy, (0, 255, 255), 2)
cv2.line(img, box.keypoints[0].xy, box.keypoints[2].xy, (0, 255, 255), 2)
cv2.line(img, box.keypoints[2].xy, box.keypoints[4].xy, (0, 255, 255), 2)
cv2.line(img, box.keypoints[3].xy, box.keypoints[5].xy, (0, 255, 255), 2)
cv2.line(img, box.keypoints[4].xy, box.keypoints[6].xy, (0, 255, 255), 2)
# 左右手连接
cv2.line(img, box.keypoints[7].xy, box.keypoints[5].xy, (255, 0, 0), 2)
cv2.line(img, box.keypoints[7].xy, box.keypoints[9].xy, (255, 0, 0), 2)
cv2.line(img, box.keypoints[8].xy, box.keypoints[6].xy, (255, 0, 0), 2)
cv2.line(img, box.keypoints[8].xy, box.keypoints[10].xy, (255, 0, 0), 2)
# 中间身体相连
cv2.line(img, box.keypoints[5].xy, box.keypoints[6].xy, (100, 255, 100), 2)
cv2.line(img, box.keypoints[11].xy, box.keypoints[5].xy, (100, 255, 100), 2)
cv2.line(img, box.keypoints[12].xy, box.keypoints[6].xy, (100, 255, 100), 2)
cv2.line(img, box.keypoints[12].xy, box.keypoints[11].xy, (100, 255, 100), 2)
# 左右脚连接
cv2.line(img, box.keypoints[13].xy, box.keypoints[11].xy, (255, 255, 0), 2)
cv2.line(img, box.keypoints[13].xy, box.keypoints[15].xy, (255, 255, 0), 2)
cv2.line(img, box.keypoints[14].xy, box.keypoints[12].xy, (255, 255, 0), 2)
cv2.line(img, box.keypoints[14].xy, box.keypoints[16].xy, (255, 255, 0), 2)
#保存图片
cv2.imwrite(output_path, img)
#窗口显示图片
cv2.imshow('result',img)
cv2.waitKey() #等待键盘任意按键按下
cv2.destroyAllWindows() #关闭窗口
基于摄像头
可以先学习在OpenCV的 USB摄像头使用教程
'''
实验名称:YOLO11姿势识别
实验平台:核桃派2B
说明:基于摄像头
'''
from walnutpi import YOLO11
import cv2
#【可选代码】允许Thonny远程运行
import os
os.environ["DISPLAY"] = ":0.0"
label_names = ["person"]
model_path = "model/yolo11n-pose.nb"
yolo = YOLO11.YOLO11_POSE(model_path)
# 打开摄像头并循环获取帧显示到屏幕上
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("Cannot open camera")
exit()
# 设置为1080p
# cap.set(cv2.CAP_PROP_FOURCC, cv2.VideoWriter_fourcc(*"MJPG"))
# cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1920) # 设置宽度
# cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 1080) # 设置长度
boxes = []
while True:
# 读取一帧图像并显示出来
ret, img = cap.read()
if not ret:
print("Can't receive frame (stream end?). Exiting ...")
break
if not yolo.is_running:
yolo.run_async(img, 0.3)
boxes = yolo.get_result()
# 到图上画框
for box in boxes:
label = str(label_names[box.label]) + " " + str('%.2f'%box.reliability)
left_x = int(box.x - box.w / 2)
left_y = int(box.y - box.h / 2)
right_x = int(box.x + box.w / 2)
right_y = int(box.y + box.h / 2)
(label_width, label_height), bottom = cv2.getTextSize(
label,
cv2.FONT_HERSHEY_SIMPLEX,
0.5,
1,
)
(label_width, label_height), bottom = cv2.getTextSize(
label,
cv2.FONT_HERSHEY_SIMPLEX,
0.5,
1,
)
cv2.rectangle(
img,
(left_x, left_y),
(right_x, right_y),
(255, 255, 0),
2,
)
cv2.rectangle(
img,
(left_x, left_y - label_height * 2),
(left_x + label_width, left_y),
(255, 255, 255),
-1,
)
cv2.putText(
img,
label,
(left_x, left_y - label_height),
cv2.FONT_HERSHEY_SIMPLEX,
0.5,
(0, 0, 0),
1,
)
# 0 鼻子 1 左眼 2 右眼 3 左耳 4 右耳 5 左肩 6 右肩
# 7 左手肘 8 右手肘 9 左手腕 10 右手腕 11 左髋部 12 右髋部
# 13 左膝盖 14 右膝盖 15 左脚踝 16 右脚踝
for i in box.keypoints: # 绘制所有可见度够高的关键点
if i.visibility > 0.5:
cv2.circle(img, i.xy, 5, (0, 0, 200), -1)
# 头部连接
cv2.line(img, box.keypoints[3].xy, box.keypoints[1].xy, (0, 255, 255), 2)
cv2.line(img, box.keypoints[1].xy, box.keypoints[0].xy, (0, 255, 255), 2)
cv2.line(img, box.keypoints[0].xy, box.keypoints[2].xy, (0, 255, 255), 2)
cv2.line(img, box.keypoints[2].xy, box.keypoints[4].xy, (0, 255, 255), 2)
cv2.line(img, box.keypoints[3].xy, box.keypoints[5].xy, (0, 255, 255), 2)
cv2.line(img, box.keypoints[4].xy, box.keypoints[6].xy, (0, 255, 255), 2)
# 左右手连接
cv2.line(img, box.keypoints[7].xy, box.keypoints[5].xy, (255, 0, 0), 2)
cv2.line(img, box.keypoints[7].xy, box.keypoints[9].xy, (255, 0, 0), 2)
cv2.line(img, box.keypoints[8].xy, box.keypoints[6].xy, (255, 0, 0), 2)
cv2.line(img, box.keypoints[8].xy, box.keypoints[10].xy, (255, 0, 0), 2)
# 中间身体相连
cv2.line(img, box.keypoints[5].xy, box.keypoints[6].xy, (100, 255, 100), 2)
cv2.line(img, box.keypoints[11].xy, box.keypoints[5].xy, (100, 255, 100), 2)
cv2.line(img, box.keypoints[12].xy, box.keypoints[6].xy, (100, 255, 100), 2)
cv2.line(img, box.keypoints[12].xy, box.keypoints[11].xy, (100, 255, 100), 2)
# 左右脚连接
cv2.line(img, box.keypoints[13].xy, box.keypoints[11].xy, (255, 255, 0), 2)
cv2.line(img, box.keypoints[13].xy, box.keypoints[15].xy, (255, 255, 0), 2)
cv2.line(img, box.keypoints[14].xy, box.keypoints[12].xy, (255, 255, 0), 2)
cv2.line(img, box.keypoints[14].xy, box.keypoints[16].xy, (255, 255, 0), 2)
cv2.imshow("result", img)
key = cv2.waitKey(1) # 窗口的图像刷新时间为1毫秒,防止阻塞
if key == 32: # 如果按下空格键,打断退出
break
cap .release() # 关闭摄像头
cv2.destroyAllWindows() # 销毁显示摄像头视频的窗口